

#04 Základné delenie robotov
 V danom príspevku si uvedieme základné delenie priemyselných robotov, pričom čitateľ si vytvorí obraz o dostupných robotoch na trhu a ich praktickom využití. Jednotlivé druhy robotov (v praxi najčastejšie využívaných ) sú opísané v samostatných článkoch.
V danom príspevku si uvedieme základné delenie priemyselných robotov, pričom čitateľ si vytvorí obraz o dostupných robotoch na trhu a ich praktickom využití. Jednotlivé druhy robotov (v praxi najčastejšie využívaných ) sú opísané v samostatných článkoch.
Manipulačné zariadenia - roboty môžu byť klasifikované podľa rôznych kritérií. Ako príklad uvedieme rozdelenie podľa:
- kinematickej štruktúry,
- počtu stupňov voľnosti,
- spôsobu riadenia, programovania,
- bezpečnosti robotov a iné.
Jedno zo základných delení je práve delenie podľa kinematickej štruktúry: (druhom kinematických štruktúr sa viac venujeme v článku: KINEMATIKA Robotov) V praxi medzi najčastejšie využívané priemyselné roboty sú vyznačené hrubým písmom (1-4).
- SÉRIOVÉ ROBOTY
Sériová kinematika robota ja charakteristická otvoreným kinematickým reťazcom, v ktorom sú jednotlivé kinematické dvojice usporiadané za sebou. Pohyb koncového člena kinematického reťazca je výsledkom na seba nadväzujúcich pohybov jednotlivých kinematických členov. Pričom jednotlivé členy sa môţu pohybovať nezávislé na sebe. Začiatok kinematického reťazca je spojený so základňou robota. Podľa kombinácie rotačných (R) a translačných (T) kinematických dvojíc polohovacieho zariadenia, sa sériové priemyselné roboty rozdeľujú na:
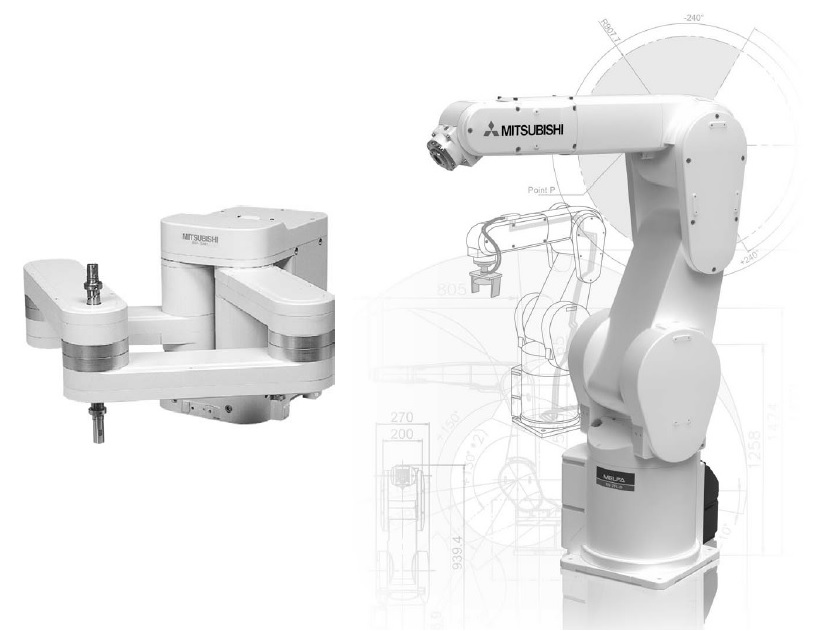
1 - Angulárne roboty (najčastejšie využívané priemyselné roboty)
Ako sme si uviedli, ide o roboty so sériovou kinematikou. Ukážku angulárnych robotov môžeme vidieť na nasledujúcom videu. V praxi ide o najčastejšie využívané priemyselné roboty využívané za účelom manipulácie bremien, rôznych technologických operácií a podobne. Najčastejšie využívaným je 6-osí robot. Viac informácií nájdete v samostatnom príspevku: 6- Osé roboty.
[embed]https://youtu.be/dRXQFQ2Ub9M?t=39[/embed]Ide o roboty so sériovou kinematikou. SCARA roboty sú jedny z najčastejšie využívaných priemyselných robotov za účelom vykonávania operácií "pick and place" (uchop a prelož - manipulácia s bremenom). Je to predovšetkým pre ich vysokú rýchlosť pohybu a presnosť polohovania. Naj-častejšími aplikáciami sú práve pre ich uvedené vlastnosti balenie, paletizácia, depalatizácia a podobne. Cylindrické roboty nepatria medzi často využívané priemyselné roboty. Ide o robota s možnosťou pohybu v 3 osiach. Jeden rotačný a dva lineárne pohyby. Na nasledujúcom videu môžete vidieť princíp uvedeného typu robota a jeho využitie (Najčastejšie ide o manipulačné úlohy, bodové zváranie a podobne). V minúte 1:21 nasledujúceho videa je opísaný princíp cylindrického robota. Sférické roboty, rovnako ako cylindrické roboty, sú jedny z menej využívaných druhov priemyselných robotov. Jednou z častých aplikácií môže byť vykonávanie rôznych technologických operácií ako sú zváranie, brúsenie, striekanie a podobne. V súčasnosti je daný druh robota nahrádzaný 6-osím angulárnym robotom, ktorého univerzálnosť je omnoho vyššia. Princíp uvedeného robota si môžeme predstaviť na základe nasledujúceho obrázka a videa (v čase: 2:48). 2 - SCARA roboty
3 - Kartézske roboty
Cylindrické roboty
Sférické roboty

Medzi nevýhody robotov so sériovou kinematikou patrí: (podľa Kondra, 2009) Chyby v jednotlivých kĺboch robota, akými sú napr. vôle, sa navzájom spočítavajú. Prvá os robota je zaťaţená najviac (nesie váhu všetkých osi) a kaţdá ďalšia os je zaťaţená váhou nasledujúcich. Z toho vyplývajú poţiadavky na pohony a maximálnu nosnosť robota. Jednotlivé osi sú zaťaţené ohybovými a torznými silami.
- PARALELNÉ ROBOTY
Paralelná kinematika je špecifická uzatvoreným kinematickým reťazcom. Takýto mechanizmus sa skladá zo základne (bázy) prepojenej s pohyblivou platformu prostredníctvom minimálne dvoch paralelných členov (ramien). Pohyblivá platforma môţe mať od troch do šiestich stupňov voľnosti. Jej pohyb je daný súčasným pohybom všetkých ramien.
4 - Delta roboty
Delta roboty patria medzi paralelné roboty. Ich využitie je veľmi široké, avšak najčastejšie ide o aplikácie, podobne ako u SCARA robotov, " pick and place" ( manipulácia s bremenom). s Daným druhom robotov sa bežne môžeme stretnúť v potravinárskom priemysle. Na nasledujúcom videu si môžeme pozrieť príklad využitia DELTA robota práve v spomínanom potravinárskom priemysle.
[embed]https://youtu.be/aPTd8XDZOEk?t=53[/embed]Tripody
Hexapody
V porovnaní so sériovými robotmi majú paralelné mechanizmy tieto výhody: Konštrukcia nie je zaťaţená ohybovými silami, ale vzniká priaznivejšie tlakové resp. ťahové zaťaţenia. Pohybujúce sa časti majú niţšiu hmotnosť. Vysoká presnosť. Umoţňujú vyššie pracovné rýchlosti a zrýchlenia. Hlavnou nevýhodou paralelných kinematických mechanizmov je malý pracovný priestor.
- HYBRIDNÉ ROBOTY
Zdroj:
- www.carobot.it
- https://sk3a.mitsubishielectric.com
- http://www.omanglobal.com/wp-content/uploads/2014/07/ipsRob_2.jpg
- https://www.robots.com
- http://www.looptechnology.com/graphics/cartesian-robot.gif
- https://www.robots.com/images/cylindrical.gif
- KONDRA, M. 2009. Návrh mechanického subsystému školského Delta robota : diplomová práca. Ţilina : ŢU, 2009. 52 s.
- POPPEOVÁ, V. – ČUBOŇOVÁ, N. – URÍČEK, J.- KUMIČÁKOVÁ, D. 2002. Automatizácia strojárenskej výroby. Ţilina: ŢU: EDIS, 2002. 230 s.. ISBN 80-8070-009-5
- TLACH, V. 2016. Návrh pracoviska pre meranie pracovných charakteristík priemyselného robota FANUC LR Mate 200iC : diplomová práca. Žilina : ŽU, 2016. 126 s.