

#05 Šesťosé angulárne roboty
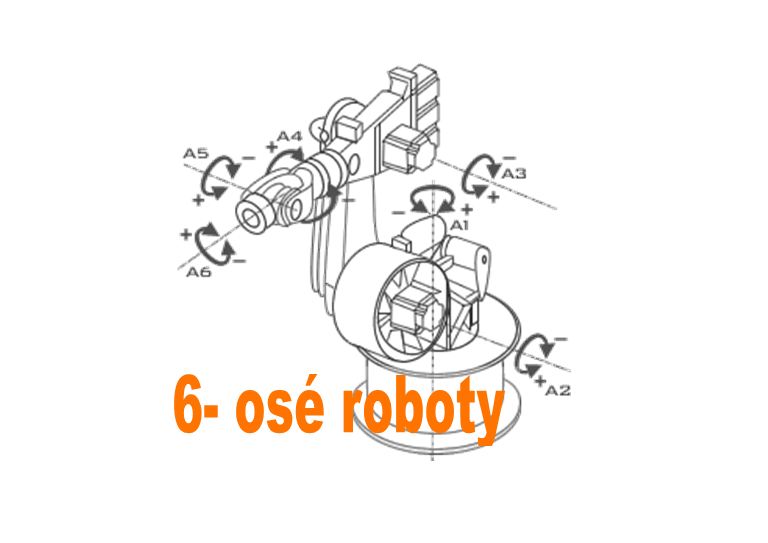
Predchádzajúci článok sa venoval základným pojmom v oblasti robotiky, Preto predpokladáme, že čitateľ je s jednotlivými pojmami a základnými princípmi oboznámený. V tomto článku si povieme niečo málo o 6 osích priemyselných robotov so sériovou kinematikou. Ide o robota so 6-stimi stupňami voľnosti. Takýto robot nám teda umožňuje viac flexibility (možných pohybov) než napríklad 3 osí robot. Ide o pohyb v smere X, Y, Z a rotácia okolo jednotlivých osí. Ako sme si uviedli v predchádzajúcom článku, ide o najčastejšie používaného robota v priemyselnom odvetví. Jeho využitie je široké.
Ako príklad si uvedieme:
- manipulačné operácie s bremenom (balenie, paletizácia, depaletizácia, presun materiálu, atď.)
- montážne práce,
- technologické operácie (zváranie, brúsenie, lakovanie, atď)
- kontrola, skenovanie kvality súčiastok a iné.
1x vidieť je lepšie než 100x počuť a čítať. Preto si na nasledujúcom videu môžete pozrieť princíp činnosti 6-osého priemyselného robota spolu s opisom jednotlivých osí.
Na nasledujúcich videách Vás pozývame pozrieť sa pod masu železa robota :)
Zdroj:
- http://www.looptechnology.com/graphics/
- youtube.com