

#03 Pohyb a akčné členy efektorov
Pohyb efektora
Efektor predstavuje súčasť robota slúžiacu na interakciu s okolitým prostredím. Zadané príkazy a inštrukcie sú pomocou ovládacej jednotky "transformované" na mechanický pohyb a rôzne činnosti. Ako sa však efektor dokáže pohybovať? Túto funkciu plnia akčné členy.
 Akčné členy sú súčasťou zariadenia alebo stroja (robota), ktorá zabezpečuje mechanické pohyby vďaka premene energie. Zvyčajne ide o premenu elektrickej, pneumatickej alebo hydraulickej energie na mechanickú energiu. Zjednodušene ide o súčasti umožňujúce pohyb iných súčastí stroja alebo robota. Občas je funkcia akčných členov prirovnávaná k funkcii svalov v ľudskom tele.
Akčné členy sú súčasťou zariadenia alebo stroja (robota), ktorá zabezpečuje mechanické pohyby vďaka premene energie. Zvyčajne ide o premenu elektrickej, pneumatickej alebo hydraulickej energie na mechanickú energiu. Zjednodušene ide o súčasti umožňujúce pohyb iných súčastí stroja alebo robota. Občas je funkcia akčných členov prirovnávaná k funkcii svalov v ľudskom tele.
Rozdelenie akčných členov
Akčné členy môžme rozdeliť podľa spôsobu pohybu a využívanej energie:
- Elektrické: Lineárne, Rotačné
- Hydraulické: Lineárne, Rotačné
- Pneumatické: Lineárne, Rotačné
- Piezoelektrické
Efektor alebo akčný člen?
Pojmy "efektor" a "akčný člen" bývajú občas používané v rovnakom zmysle: "Súčasti umožňujúce robotom vykonávať činnosti". Efektory a akčné členy sú však odlišné. Rozlišujú sa hlavne v ovládaných stupňoch voľnosti (DOF).
Stupne voľnosti
Väčšina jednoduchých akčných členov ovláda len jeden stupeň voľnosti, teda jeden pohyb. Počet ovládaných stupňov voľnosti robota má veľký vplyv na jeho schopnosť vykonať požadovanú úlohu. Rovnako ako napr. senzory, aj efektory musia byť prispôsobené na danú úlohu.
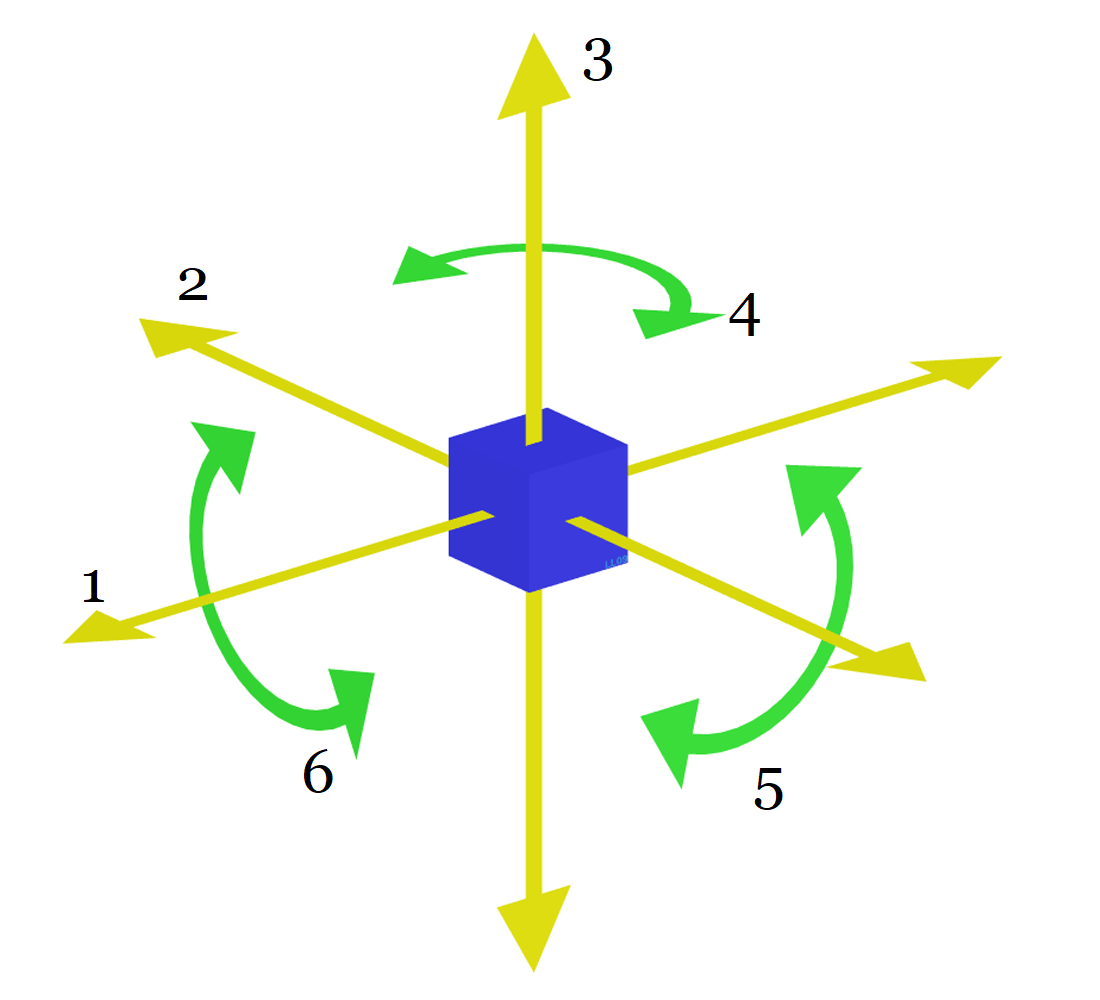
Teleso v priestore má 6 stupňov voľnosti (pohyb v osiach x,y,z a rotácia okolo týchto osí). Pri výbere efektora (a príslušných akčných členov) je potrebné vedieť počet ovládaných stupňov voľnosti. Pokiaľ má efektor akčný člen pre každý stupeň voľnosti, je možné ich ovládať všetky. Táto možnosť je však zriedkavá, a preto je ovládanie robota náročnejšie.
 Príkladom k popísaniu stupňov voľnosti môže byť pohyb auta:
Auto má 3 stupne voľnosti, polohu (x,y) a orientáciu. Ovládané DOF sú však len dva: Jazda dopredu/dozadu a riadenie. Nakoľko ovládaných DOF je menej ako je celkový počet DOF, niektoré pohyby nie sú možné ako napríklad pohyb do strany. Preto pri paralelnom parkovaní musíme opísať zložitejšiu dráhu. Pridávanie plynu reprezentuje funkciu akčného člena a výsledný pohyb efekt jeho činnosti.
Podľa ovládaných DOF roboty môžme rozdeliť na:
Príkladom k popísaniu stupňov voľnosti môže byť pohyb auta:
Auto má 3 stupne voľnosti, polohu (x,y) a orientáciu. Ovládané DOF sú však len dva: Jazda dopredu/dozadu a riadenie. Nakoľko ovládaných DOF je menej ako je celkový počet DOF, niektoré pohyby nie sú možné ako napríklad pohyb do strany. Preto pri paralelnom parkovaní musíme opísať zložitejšiu dráhu. Pridávanie plynu reprezentuje funkciu akčného člena a výsledný pohyb efekt jeho činnosti.
Podľa ovládaných DOF roboty môžme rozdeliť na:
- Holonomické: Počet riadených DOF = celkový počet DOF
- Neholonomické: Počet riadených DOF < celkový počet DOF
Využitie efektora
Na základe spôsobu využitia pohybu efektora je možné rozeliť robotiku nasledovne:
- Mobilná: Pohyb robota do požadovanej pozície a orientácie.
- Manipulačná: Pohyb efektora do požadovanej pozície a orientácie.
Pre lepšiu predstavu, manipulačnou úlohou u človeka môže byť presunutie ukazováka do presnej polohy v 3D priestore. V prípade robota ide zväčša o uchopenie a presunutie objektu bezpečne a efektívne.
Programovanie a plánovanie jednotlivých pohybov
Efektor je súčasťou ramena robota, preto je pri programovaní a plánovaní pohybu brať do úvahy celé rameno a jeho limity. Pri pohybe je dôležité aby neboli presiahnuté možnosti jednotlivých kĺbov a aby sa rameno nepoškodilo alebo nepoškodilo inú časť robota alebo prostedia. Autonómna manipulácia je preto veľmi náročná. Zvyčajne neexistuje priama väzba medzi pohybom ktorý má efektor vykonať a činnosťou akčného člena ktorá tento pohyb umožňuje. Vzťah medzi činnosťou akčného člena a efektora skúma kinematika. Aby sme dokázali efektívne ovládať a naprogramovať robota (alebo manipulátor) potrebujeme poznať jeho kinematiku:
- Aké súčasti sú prepojené?
- Počet kĺbov
- Počet DOF pre každý kĺb a pod.
Všetky tieto parametre je možné formulovať matematicky a "poskladať" rovnice ktoré hovoria o tom, ako konvertovať napr. uhly jednotlivých kĺbov na kartézske súradnice polohy efektora alebo TCP bodu alebo opačne. Úloha prevodu kartézskych súradníc (x,y,z) na uhly a natočenia jednotlivých kĺbov sa nazýva inverzná kinematika. Plánovanie pohybov zahŕňa:
- Plánovanie trajektórie
- Inverznú kinematiku
- Inverznú dynamiku
- Riešenie problémov s redundanciou (existuje niekoľko možností dosiahnutia požadovanej polohy)
Efektory môžu mať jednoduhšiu konštrukciu ako napríklad 2D gripper, rôzne technologické nástroje a pod. avšak to môžu byť aj zložité štruktúry, podobné ľudskej ruke s niekoľkými kĺbmi. Každý druh efektora vyžaduje pri plánovaní pohybov špecifický prístup a znalosti všetkých jeho vlastností, potrebných na efektívne a bezpečné vykonanie danej úlohy. Autor: Jakub Michalčík | Daily Automation Zdroje: