
#03 Pracovné charakteristiky

Priemyselné roboty sú okrem základných technických vlastností, medzi ktoré patrí maximálna nosnosť, počet stupňov voľnosti, tvar pracovného priestoru a ďalšie, špecifikované aj pracovnými charakteristikami. Norma STN ISO 9283 (1998) definuje štyri základné typy pracovných charakteristík:
- Charakteristiky polohy,
- Charakteristiky dráhy,
- Minimálny čas polohovania,
- Statická poddajnosť.
Ďalšie členenie charakteristík dráhy a polohy uvádzajú nasledovné orbázky č. 1 a č.2.

Poprední svetoví výrobcovia priemyselných robotov z pracovných charakteristík popísaných normou (STN ISO 9283, 1998) uvádzajú v technickej dokumentácii k robotom len opakovateľnosť polohovania RP. Taktiež informujú o možnosti aplikácie, nosnosti, tvare a veľkosti pracovného priestoru, či rozsahu ulov natočenia a rýchlostiach jednotlivých osí konkrétneho typu robota. U výrobcov robotov, ktorí sa zameriavajú len na určité špecifické aplikácie robotov, napr. len pre oblasť zvárania, je predpoklad, že uvedú v technickej dokumentácii viaceré z pracovných charakteristík, ktoré súvisia s aplikáciou, pre ktorú bol robot navrhnutý.
V každom prípade pracovné charakteristiky umožňujú podrobnejší pohľad na vlastnosti robota, ovplyvňujúce jeho prácu v konkrétnej aplikácii.

Význam uvedených pracovných charakteristík sa líši podľa aplikácie, ktorú konkrétny robot vykonáva. Napr. pre robot vykonávajúci aplikáciu lakovania v automobilovom priemysle budú najdôležitejšie pracovné charakteristiky súvisieť s dráhovou presnosťou a rýchlosťou. Norma (STN ISO 9283, 1998) okrem špecifikácie jednotlivých pracovných charakteristík a spôsobu ich merania odporúča aj výber tých najdôležitejších, na základe niekoľkých typických aplikácii robota.
Čo nám hovorí prax?
Ako sme si začiatkom príspevku uviedli, nie všetky uvedené pracovné charakteristiky je potrebné pri výbere správneho robota pre Vašu aplikáciu. V základných katalógoch od výrobcov robotov preto nájdete bežne nasledovné dôležité údaje, na základe ktorých sa viete pri výbere správe rozhodnúť:
- menovitá nosnosť
- menovité prídavné zaťaženie ramena
- maximálny dosah / príp. zdvih v ose Z
- počet os/ počet stupňov voľnosti
- presnosť opakovania polohy
- montážna poloha
- rozsah jednotlivých osí (pr: A1 - A6 v prípade 6 osého robota)
- rýchlosť jednotlivých osí pri menovitej nosnosti
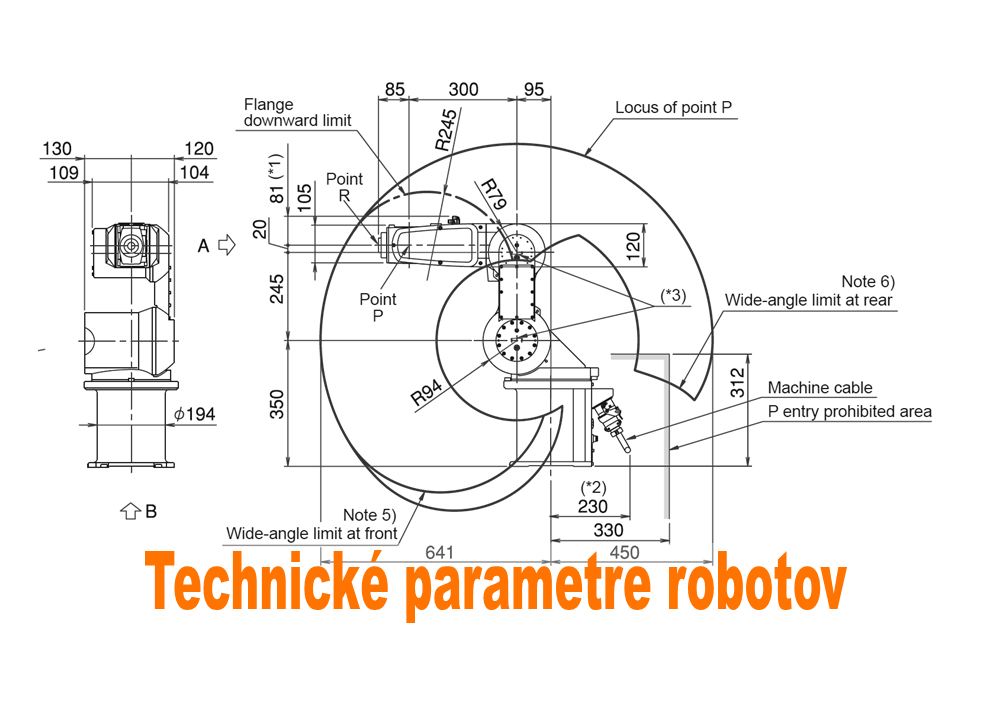
Na nasledujúcich obrázkoch si môžete pozrieť príklad charakteristík z katalógového listu priemyselného robota od spoločnosti Mitsubishi (r. 2016). Na prvom z nich môžeme pozorovať základné údaje, pričom na druhom obrázku je graficky znázornený pracovný priestor a rozmery robota. Na základe uvedených parametrov dokážu technický inžinieri vybrať vhodného robota a navrhnúť vlastné robotické pracovisko. (pre zväčšenie klikni na obrázky)


ZDROJ: TLACH, V. 2016. Návrh pracoviska pre meranie pracovných charakteristík priemyselného robota FANUC LR Mate 200iC : diplomová práca. Žilina : ŽU, 2016. 126 s. Mitsubishi katalóg produktov- priemyselných robotov (Jun, 2011)