
#05 Technická špecifikácia TS 15066 pri kooperácii človek - robot
V danom príspevku sa budeme venovať predovšetkým základnými, a zároveň nutnými bezpečnostnými požiadavkami pre kooperujúce priemyselné roboty, ktoré sú obsiahnuté v technickej špecifikácii ISO TS 15066. Ide tu predovšetkým o nový koncept bezpečnosti práce, o ktorý by sa mali opierať predovšetkým dizajnéri robotických pracovísk určených na kooperáciu človeka s robotom. V technickej špecifikácii (TS) sa do úvahy taktiež berú jednotlivé časti robota ako je koncový efektor, nástroje a iné zariadenia potrebné k vykonávaniu práce.
Základný princíp TS spočíva v nutnosti zaobstarania bezpečnostných riadiacich systémov, ktoré poskytujú relevantný výkon pre monitorovanie parametrov súvisiacich s bezpečnosťou ako napríklad rýchlosť, pozícia, sila a podobne. Po uspokojení požadovanej podmienky môže byť robot využitý na kooperujúce úlohy s človekom, pričom napriek spoločnému pracovnému priestoru počet nehôd rapídne klesá.
Vo všeobecnosti je ručné navádzanie robota považované za úlohu, ktorá je po splnení požiadavky zníženia rýchlosti a jej následné bezpečnostné monitorovanie málo riziková. Takéto operácie však môžu byť vykonávané iba v prípade zaškoleného personálu a za použitia bezpečnostného spínača, ktorý slúži ako bezpečnostná ochrana v prípade straty vedomia osoby, ktorá robota riadi. Počas celej doby ručného navádzania robota musí byť rýchlosť redukovaná a zároveň monitorovaná riadiacim systémom robota. Bezpečnostné meranie rýchlosti či pozície neznamená, že meranie je redundantné, ale že meracie systémy sú certifikované a sú kategorizované ako SIL3.
Monitorovanie bezpečnostnej vzdialenosti od robota
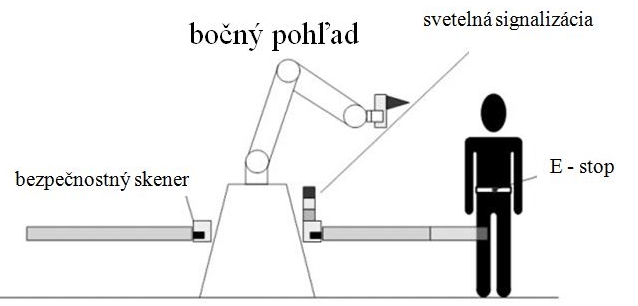
Obr. č.1: TS 15066 - minimálna bezpečnostná vzdialenosť
Pri kooperácii človeka s robotom sa podľa ISO TS 15066 predpokladá, že riadiaci systém robota má okrem iného implementovaný algoritmus na vyhnutie sa prekážke v prípade možného vzniku kolízie. Na dosiahnutie tohto cieľa je za potreby využitie merania rýchlosti robota a merania jeho vzdialenosti od operátora. Tým docielime nielen bezpečnosť operátora, ale taktiež efektívnu a variabilnú voľbu rýchlosti robota a jeho pracovnej oblasti. Na základe minimálnej vzdialenosti operátora (Obr. 1) od robota vieme taktiež za pomocou určitých algoritmov vypočítať maximálnu rýchlosť pohybov, čo je v súčasnosti považované za veľmi efektívne riešenie na dosiahnutie minimálneho pracovného taktu robota v rámci určitej operácie.
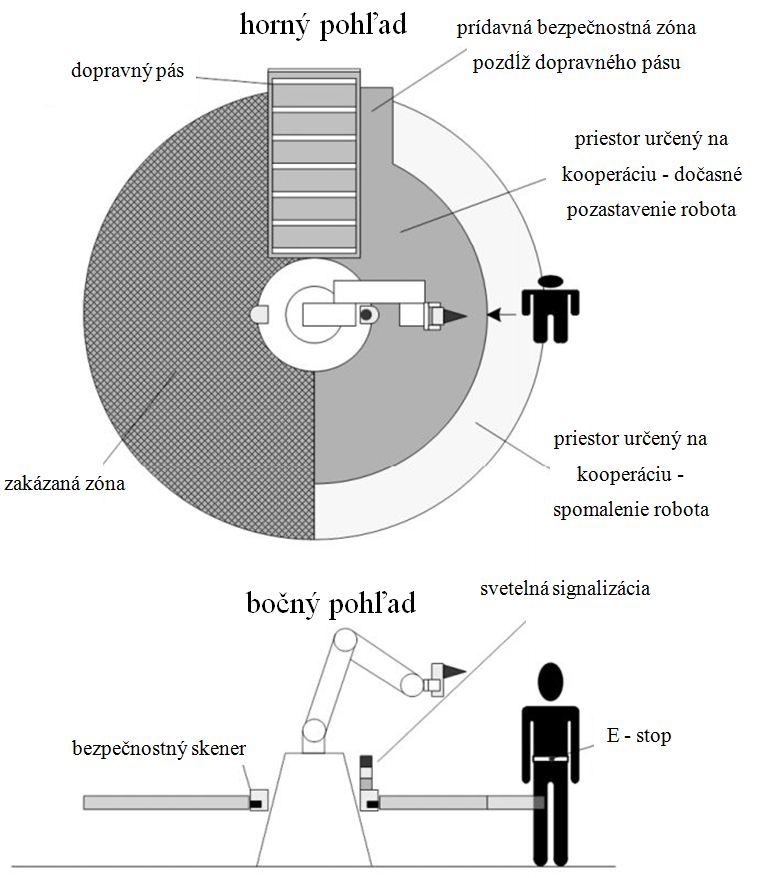
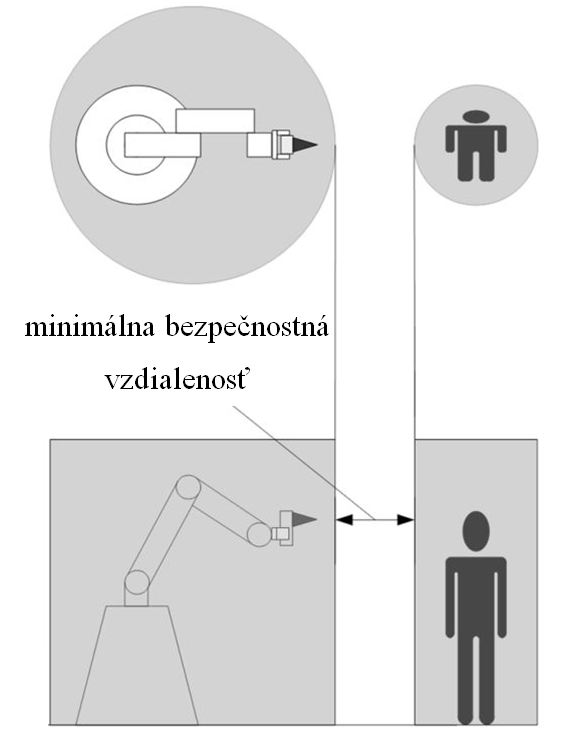
Obr. č.2: TS 15066 - Príklad merania minimálnej vzdialenosti operátora od robota
Na obrázku (Obr. 2) vidíme príklad merania, pričom následne môžeme, ako bolo naznačené, voliť rýchlosť robota prípadne v kritických situáciách docieliť úplné zastavenie.