

#04 Základné typy kamerových systémov
V uvedenom článku si uvedieme základné typy kamerových systémov pre strojové videnie. Vo všeobecnosti poznáme tri kategórie kamerových systémov, a to:
- 1D strojové videnie (Vision system),
- 2D strojové videnie (Vision system),
- 3D strojové videnie (Vision system).
Rozoberme si jednotlivé technológie postupne:
1D strojové videnie:
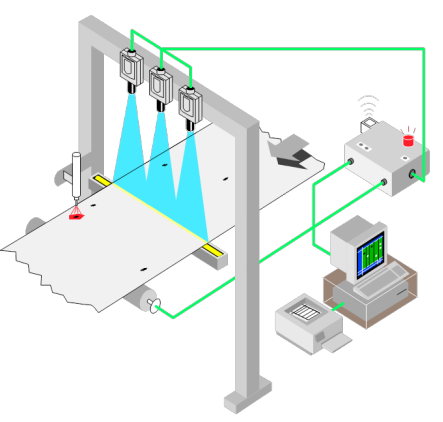
1D vision system analyzuje signál „jednej línie“ (Line scanning) v čase namiesto pozerania sa na celú oblasť naraz. (Viď obrázok) Takáto metóda sa najčastejšie využíva v prípade detekcie rôznych defektov počas kontinuálnej výroby ako je napríklad: výroba papiera, a teda verifikácie kvality rolky papiera na dopravnom páse, kontrola plechov počas navíjania a podobne.
2D strojové videnie:
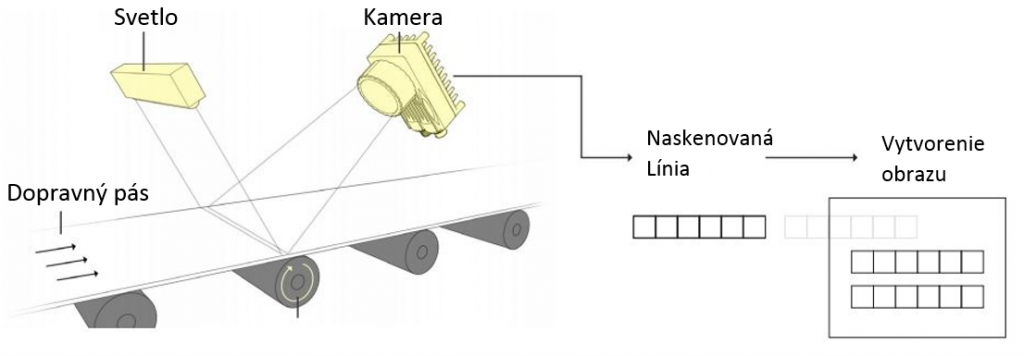
2D strojové videnie je od 1D odlišné v tom, že vyhodnotenie/ inšpekcia je realizovaná na základe 2D obrazu a nie samotnej „čiary“ ako je to v prípade 1D. Obraz je vyhotovený buď ako skenovanie určitej plochy (area scanning) alebo vytváraním obrazu na základe skenovania jednotlivých línií a ich následným skladaním do obrazu (Line by Line scanning) – viď obrázok nižšie.
Metódy 2D strojového videnia sú nasledovné:
- Area scanning
- Line by Line scanning (Line Scan)
Area scanning VS. Line Scan
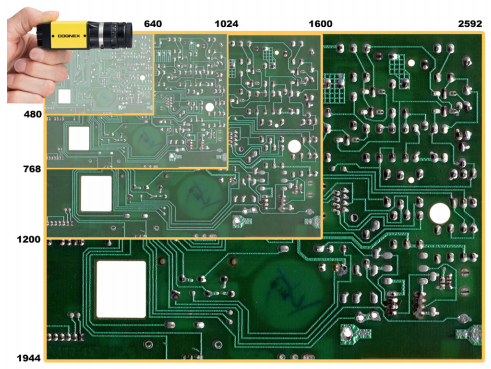
Existuje množstvo aplikácií, kde prevažujú výhody jedného systému nad druhým a naopak. Line Scan prevažuje predovšetkým pri inšpekcii guľatých, oválnych súčiastok vyžadujúcich si viac skenovaní na pokrytie celého povrchu. V takomto prípade je častým využívaním rotovanie skenovaného objektu cez snímanú líniu 2D kamery a následného skladania obrazu. Vo všeobecnosti môžeme tvrdiť, že Line Scan je výhodnejší skôr tam, kde je zabezpečený kontinuálny pohyb súčiastky. Pri statických foteniach, kde má súčiastka pevnú statickú polohu však nie je možné využiť Line Scan. Tu je možné využitie najčastejšie využívanej metódy 2D kamerových systémov, a to Area Scanning, ktoré umožňuje ako už bolo spomínané vytvorenie obrazu v rôznom rozlíšení podľa typu kamery.
3D strojové videnie:
Zachytenie obrazu v 3D môže byť realizované niekoľkými spôsobmi. K dispozícií sú viaceré technológie, pričom každá z nich má svoje výhody i nevýhody.
Vo všeobecnosti môžeme uvažovať nad dvoma metódami:
- Technológia skenovania
- Technológia „Snapshot“ – zachytenie obrazu
Pri technológii skenovania je 3D obraz vytvorený skenovaním profilu skenovaného objektu počas jeho pohybu, alebo počas pohybu kamery ponad skenovaný objekt. Pre korektné vytvorenie obrazu musí byť zabezpečená konštantná rýchlosť pohybu, alebo musí byť táto rýchlosť dobré známa použitím enkodérov. 3D obraz vytvorený uvedeným spôsobom je zvyčajne veľmi presný.
Pri technológii „Snapshot“ je vytvorenie 3D obrazu realizované fotením objektu rovnakým spôsobom ako je realizované fotenie bežným osobným fotoaparátom, avšak obraz je vytvorený v 3D. Oproti technológii skenovania tu nie je potrebný pohyb kamery ani objektu.
Uveďme si základné typy 3D:
Laser Triangulation – laserová triangulácia
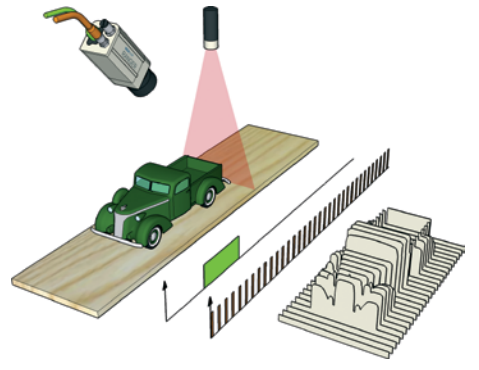
Laserová triangulácia využíva ku svojej činnosti laser a kameru, ktorá zachytáva odraz na základe ktorého vytvára profil skenovaného objektu. Nakoľko ide o technológiu skenovania, profil objektu je vytváraný počas pohybu objektu (napríklad po dopravnom páse). Uvedený spôsob je považovaný za jeden z presných metód tvorby 3D obrazu.
Time of Flihgt (TOF)
Time of Fhlight 3D kamery vytvárajú obraz technológiou „Snapshot“. Nie je teda potrebný žiadny pohyb kamery ani objektu. Pomocou TOF je princíp založený na meraní signálu svetelného lúča. Meraný je čas od vyslania lúčas z vysielača (zdroja svetelného lúča) až po jeho príjem. Poznaním fázového posunu času prijimaného signálu voči počiatočnému signálu vieme odovdiť matematickými prevodmi vziadelsnosť každého jedného bodu objektu od kamerového systému. Spojením dostávame okamžitý obraz v 3D. TOF je vhodný pre použitie predovšetkým u aplikáciach s veľkým zorným poľom a pracovnou vzdialenosťou viac ako 0.5m.

Podľa obrázku vidíme:
- krok: Vyslanie svetelných lúčov z kamery
- krok: meranie času prijímaných lúčov
- krok: vytvorenie hĺbkovej mapy
Stereo
Stereo technológia je podobná vnímaniu ľudského oka, a teda tvorby 3d obrazu. Rovnako ako u ľudí, tak u stereo technológie nie je pre vytvorenie obrazu nutný pohyb. Na rozdiel od TOF nie je taktiež nutné vysielanie svetelného lúča. Akokoľvek, pre vytvorenie 3D obrazu je nutné vytvorenie rôznych snímok s dostatočnou kvalitou, ktoré sa následne „preložia“. Využitie uvedenej technológie je výhodné predovšetkým pre aplikácie s potrebou veľkého snímaného zorného poľa a taktiež na vonkajšie použitie. Pre zvýšenie kvality fotografií je vhodné použiť prisvetlenie.

- krok: vytvorenie 2 snímok,
- krok: preloženie obrazu,
- vytvorenie hĺbkovej mapy.
ZDROJ:
- INTRODUCTION TO MACHINE VISIOn, A guide to aing process & quality improvements, Cognex.
- Machine vision, Reference Guide, Datalogic.
- SICK AG, Whitepaper, select the best technology for your vision application, SICK. Frederik Nilsson, Anders Murhed.
- https://www.keyence.com/
Autor: Ing. Peter Marčan, PhD.