

#03 EN ISO 10218 | Priemyselné roboty a ich integrácia do priemyslu
V danej časti sa budeme venovať predovšetkým štandardom EN ISO 10218-1 a EN ISO 10218-2, ktoré sa zaoberajú priemyselnými robotmi pre priemyselné prostredie. Ich súčasťou je taktiež odhad možných rizík spojených s robotmi a poskytujú požiadavky na ich elimináciu. V dnešnej dobe už taktiež opisujú aplikácie s:
- viac ako jedným robotom riadeným jedným alebo viacerými operátormi,
- robotom kooperujúcim s operátorom,
- pokrokovými programovacími nástrojmi (napríklad bezdrôtový riadiaci panel a podobne),
- dynamickým pracovným obmedzením,
- spoločným priestorom určeným pre kooperáciu.
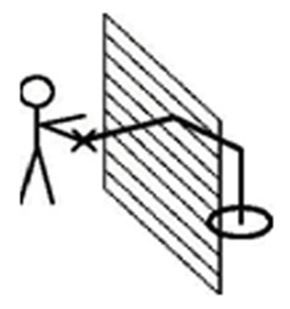
Ako sme uviedli v predošlých bodoch, daný štandard sa zaoberá definíciou spoločného priestoru ako priestorom vo vnútri chránenej oblasti, kde robot a človek môžu spoločne a súčasne vykonávať určité úlohy (Obr. 1).

obrázok č.1
Následne si stručne opíšeme významné body štandardu ISO 10218 z pohľadu možnosti využitia kooperujúcich robotov. Operátor musí byť tradične v čase vykonávania úloh robotom mimo zabezpečenej oblasti (Obr. 1) a iba výnimočne je jeho prítomnosť v uvedenej oblasti povolená. V takejto situácii je však potrebné dodržiavať určité stanovené pravidlá, medzi ktoré patria napríklad:
- do zabezpečenej oblasti môžu vstúpiť iba vyškolení operátori,
- bez aického režimu,
- rýchlosť robota pod 250 mm/s,
- v ruke musí držať ručný ovládací panel,
- robot nie je riadený externe (výnimka zastavenia robota núdzovým stopom), a podobne.
Nové zmeny v štandarde však umožňujú mnoho výhod, z ktorých je operátorom povolené vstúpiť do zabezpečenej oblasti. V takomto prípade, pokiaľ sú predvídané ochranné opatrenia, môžeme pracovať v uvedenej oblasti s robotom. Niektoré z obmedzení však ostávajú naďalej ako sú napríklad:
- operátor musí mať úplnú kontrolu nad robotom/manipulátorom,
- senzory alebo inými prostriedkami je zabezpečené limitovanie rýchlosti, sily či energie.
V čase, kedy operátor kooperuje s robotom musí byť navolený "kooperujúci" mód robota, ktorý je však rovnocenný tradičnému "aickému" a "manuálnemu" módu. Roboty určené na kooperáciu s operátormi by v preddefinovanom prostredí mali dodržiavať určité požiadavky, z ktorých uvádzame:
- kooperácia robota s človekom by mala byť indikovaná napríklad vizuálnym spôsobom (svetelný stĺpik a podobne),
- robot musí zastaviť v prípade, ak človek vkročí do oblasti, ktorá je označená ako kooperujúca oblasť. Vo svojej činnosti môže robot následne pokračovať ak operátor z danej kooperujúcej oblasti odíde. V prípade, ak sa chceme vyhnúť zastaveniu činnosti robota, musíme zabezpečiť spomalenie jeho rýchlosti,
- robot vykonáva operácie, pričom je aktívne monitorovanie rýchlosti,
- aktívne limitovanie sily (max 80W, 150N na koncový efektor), a podobne.(EN-ISO, 2011)
Kooperácia robot - operátor podľa ISO 10218
Osobitné ustanovenia upravujú prístup do kooperujúcej oblasti, pričom v každom prípade musí mať operátor alebo monitorovací systém nad robotom plnú kontrolu. Takýto kooperujúci priestor môže byť v určitých prípadoch podľa použitej metódy riadenia robota variabilný, teda napríklad na základe informácií zo snímačov môžeme meniť jeho veľkosť. Následne si ukážeme rôzne prípady kooperácie spolu so základným opisom. (ISO, 2011)
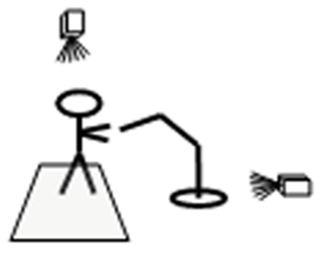
spolupráca prostredníctvom okna

Základný opis:
- aické operácie bez spoločnej pracovnej oblasti,
- robot sa pri kooperácií pohybuje smerom do okna,
- bez prerušenia aického módu,
- príklad použitia: pri vykladaní alebo nakladaní robota, čistenie hlavy robota a podobne.
Spôsob zabezpečenia ochrany osôb:
- fixné ochranné oplotenia okolo pracovného priestoru robota,
- znížená rýchlosť pri práci v blízkosti okna.
Základný opis:
- aické operácie bez spoločnej pracovnej oblasti,
- robot zastaví na zadefinovanom rozhraní, pričom manuálnym spôsobom môže byť ďalej navádzaný aj za daným rozhraním,
- príklad použitia: aické stohovanie, sprevádzaná montáž, testovanie, čistenie a podobne.
Spôsob zabezpečenia ochrany osôb:
- fixné ochranné oplotenia okolo pracovného priestoru robota,
- znížená rýchlosť pri práci v blízkosti rozhrania,
- použitie bezpečnostného ručného spínača potrebného na povolenie pohybu robota.
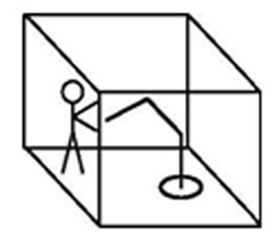
Základný opis:
- autonómne, aické operácie vo vnútri zadefinovanej spoločnej pracovnej oblasti robota a operátora,
- robot redukuje svoju rýchlosť a/alebo zastaví v prípade, ak systém zaregistruje osobu v definovanej spoločnej pracovnej oblasti,
- príklad použitia: montáž, manipulácia s bremenom, čistenie a podobne.
Spôsob zabezpečenia ochrany osôb:
- skenovanie oblasti spoločného pracovného priestoru (detekcia osôb),
- redukovanie rýchlosti,
- v prípade, ak je v čase vykonávania práce robotom narušená bezpečnostná zóna, robot zastaví. Pokračovanie v aickom móde je možné.
Základný opis:
- autonómne, aické operácie vo vnútri zadefinovanej spoločnej pracovnej oblasti robota a operátora,
- operátor môže vstúpiť do pracovnej oblasti robota aj počas vykonávania operácie, avšak iba za predpokladu zníženia rýchlosti a obmedzenia jeho trajektórií,
- príklad použitia: servis, ladenie procesov, zváracie procesy a podobne.
Spôsob zabezpečenia ochrany osôb:
- skenovanie oblasti spoločného pracovného priestoru (detekcia osôb),
- fixné ochranné oplotenia okolo pracovného priestoru robota,
- po narušení pracovného prostredia robota redukujeme jeho rýchlosť a pracovnú oblasť.

Základný opis:
- pracovný priestor je špecifikovaný aplikáciou- programom,
- ručné navádzanie robota,
- príklad použitia: ručne navádzaná montáž, zváranie, lakovanie, lepenie a podobne.
Spôsob zabezpečenia ochrany osôb:
- redukovanie rýchlosti,
- použitie bezpečnostného ručného spínača potrebného na povolenie pohybu robota.