
#01 Posúdenie rizík (Risk assesment) - PL
Daný príspevok je napísaný za účelom objasnenia základných princípov určenia potenciálnych rizík a ich následné zníženie na akceptovateľnú úroveň. Čitateľ si tak utvorí obraz o tom ako sa jednotlivé rizika posudzujú a ako určia úroveň rizika PL .
Na bezpečnostných prvkoch ako je bezpečnostná závora, dverné zámky a podobne sa stretávame s označením, do akej kategórie - úrovne rizika (PL, SIL) jednotlivé prvky patria. Dizajnéri zariadení sa tak na základe posúdenia rizík musia rozhodnúť, aké prvky s akým označením musia v danom zariadení použiť. Ako príklad: či použijú prvky SIL1, SIL2 alebo SIL 3 a podobne.
Podľa štandardov ISO musia všetky mechanizmy postúpiť posúdením rizík za účelom určenia zariadenia, stroja za bezpečný. Treba si však taktiež uvedomiť, že mnoho mechanizmov je už pri ich výrobe certifikovaných priamo výrobcom, čo uľahčuje náš proces posúdenia rizík. Akokoľvek napriek tomu, že komponenty z ktorých pozostáva napríklad robot či jeho softvér sú certifikované a označené za bezpečné ešte neznamená, že robot ako celok je bezpečný vo vzťahu ku svojmu prostrediu. Špeciálne v prípade priemyselných aplikácii je pre výrobcov robotov takmer nemožné prehlásenie, že robot bude po začlenení do akéhokoľvek procesu bezpečný. Pre jednoznačné prehlásenie robota za bezpečného vieme so spoľahlivosťou určiť práve až po spomínanom odhade a posúdení všetkých rizík. Zoberme si za príklad manipuláciu ostrého predmetu certifikovaným kolaboratívnym robotom (co-workerom). Robot je síce považovaný za bezpečný avšak aplikácia ako taká bezpečná ani zďaleka nie je. Napriek všetkým certifikátom od výrobcu kolaboratívnych robotov je preto priam nutné vykonať opätovne posúdenie rizík a následne ich minimalizovanie. Na nasledujúcom vývojovom diagrame si znázornime postup vedúci k úspešnému posúdeniu rizík spolu s odporúčaniami pre ich minimalizáciu.
- Definovanie parametrov navrhovaného pracoviska
Pri posúdení rizík je ako prvým, a zároveň nevyhnutným krokom zadefinovať všetky potrebné parametre navrhovaného robotického pracoviska. Môžeme si pomôcť kladením si nasledovných otázok - príklad robotické pracovisko: Kde bude robot použitý? Aký efektor bude robot používať? Aká bude hlavná úloha robota? V prípade manipulačných operácii - čo a aký bude manipulovaný predmet? Kladením si takýchto otázok si zabezpečíme množstvo potrebných dát dôležitých pre dôkladné a detailné posúdenie rizík. V danej fáze by sme mali vedieť aký typ robota sa bude v danej aplikácii používať. Preto je potrebné si preštudovať katalógové listy výrobcu a zistiť napríklad maximálnu rýchlosť, akceleráciu, maximálnu nosnosť a podobne.
Po zhromaždení všetkých potrebných informácii je možné pristúpiť ku ďalšiemu kroku, a to práve ku identifikácii zdrojov rizík.
- Identifikácia zdrojov rizík
V danom kroku je potrebná identifikácia všetkých možných rizík. Je potrebné si uvedomiť, že daný proces identifikácie sa vzťahuje nie len na samotné operácie ako napríklad manipulácia, zváranie, balenie a podobne, ale od na všetky operácie počnúc momentom nákupu jednotlivých komponentov či technológii, ich prijímaním od prepravcu až po samotnú likvidáciu celého navrhovaného pracoviska. Už pri samotnom nesprávnom vykladaní niekoľko desiatok kilového robota z nákladného automobilu, či uvedenie daného robota do prevádzky bez odbornej manipulácie a podobne môže mať za následok nemalé zranenia. Upozorňovanie na dané možné riziká počas inštalácie môžu vyznieť za nepodstatné, avšak odborníci na bezpečnosť varujú a tvrdia, že daný proces identifikácie zdrojov rizík je často podceňované, pričom mnoho krát už počas samotnej inštalácie robota do prevádzky skončilo tragický. Po dôkladnej identifikácii by mala byť výsledkom určitá analýza, ktorá je následne potrebná v ďalšom kroku pre stanovenie úrovne rizika.
- Stanovenie úrovne rizika
Je viacero zaužívaných spôsobov ako monitorovať a vyhodnocovať riziko. Uvádzame jednu z najpoužívanejších metód podľa ISO 13849-1:2006.
Riziko je hodnotené pomocou "Performance Level Rating - PLr" (stanovenie úrovne rizika PLr). Daná analýza používa tri rôzne parametre:
- závažnosť poranenia "S" (Severity of injury - S),
- frekvencia vystavenia sa nebezpečenstvu "F" (Frequency of exposure to hazard),
- možnosť vyhnúť sa nebezpečenstvu "P" (Possibility of avoiding hazard).
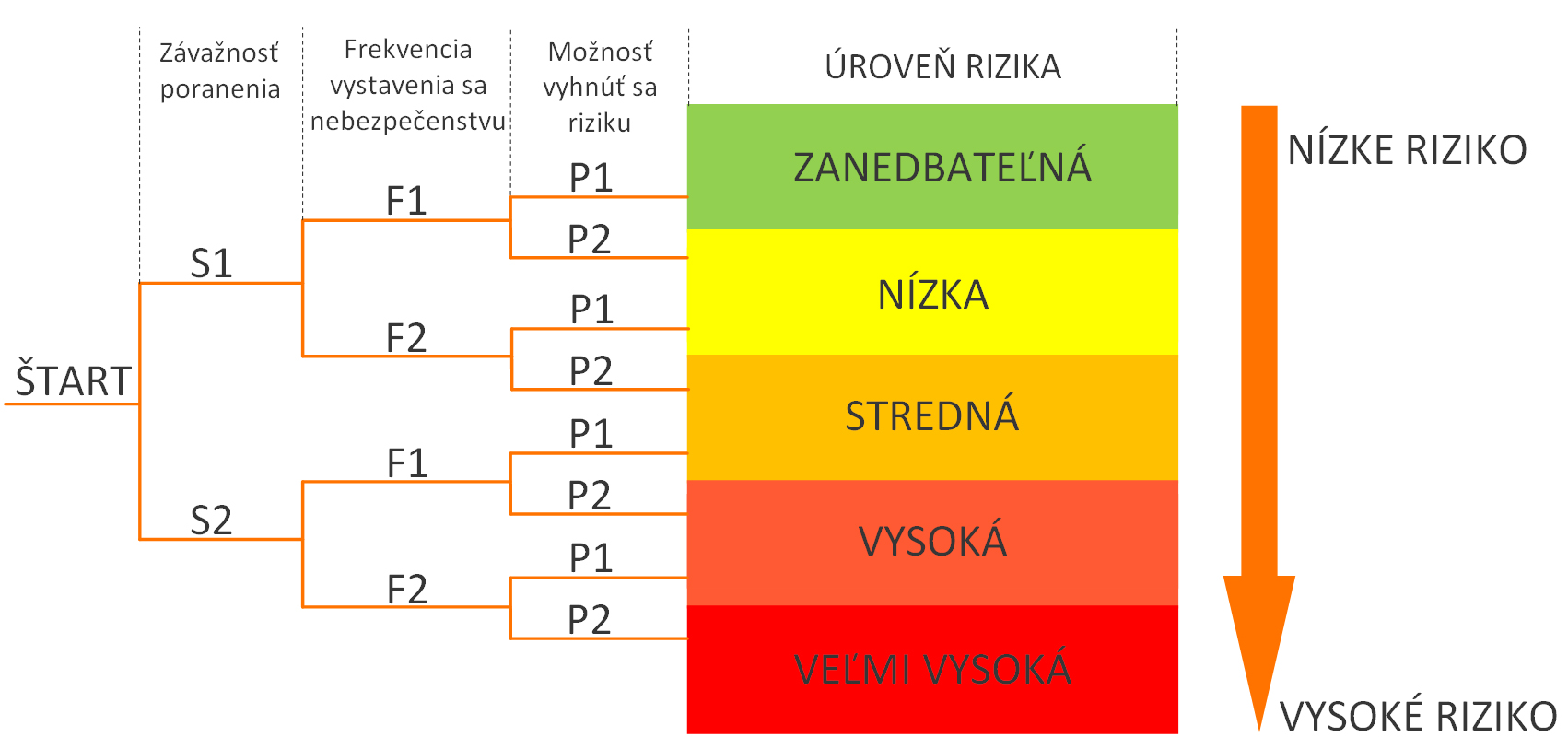
Základným princípom stanovenia rizika podľa danej metódy je prechádzať postupne podľa obrázka č. 1 od začiatku až po koniec diagramu (zľava- doprava) jednotlivými parametrami a ich hodnotením, pričom na konci zistíme úroveň rizika od zanedbateľnej až po veľmi vysokú.
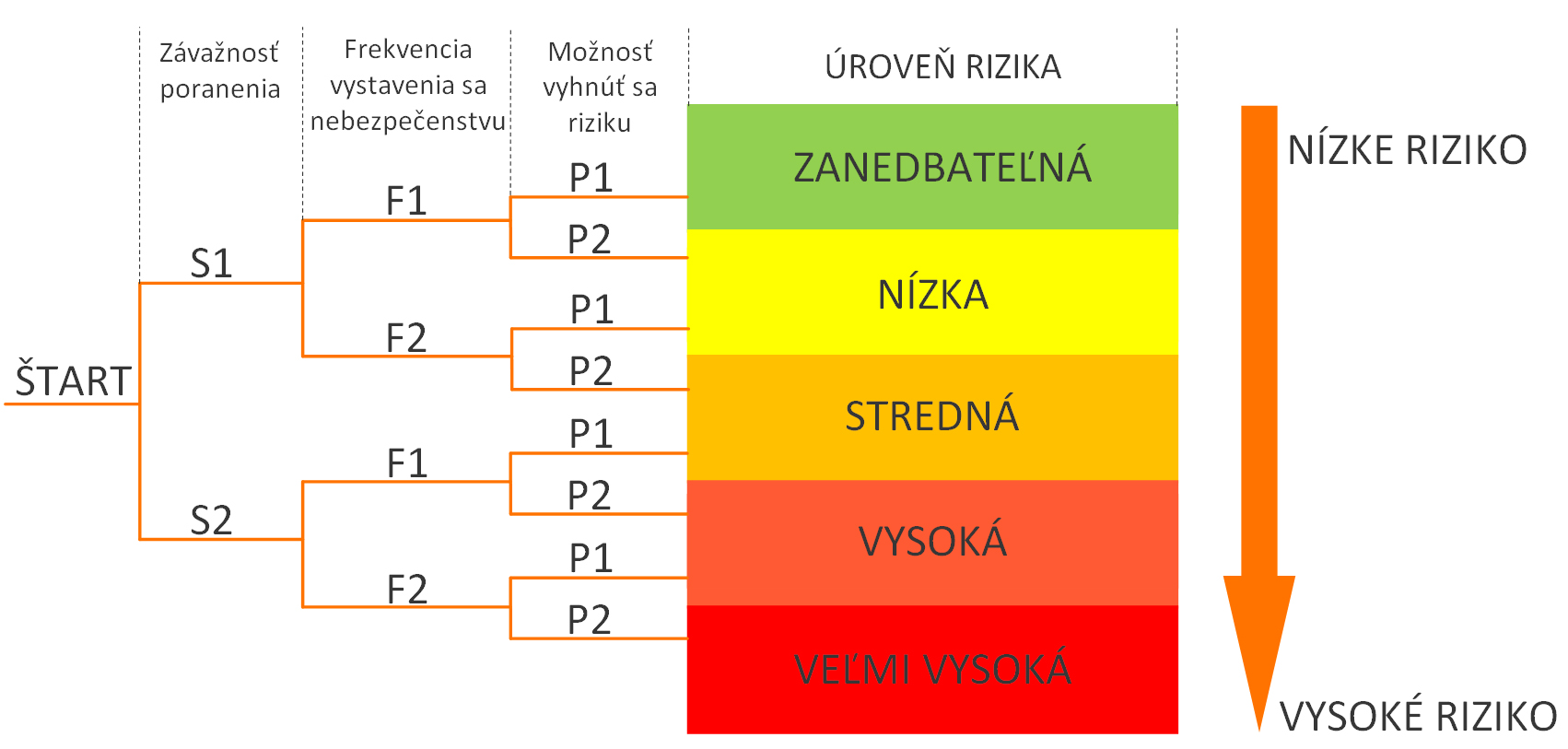
Pre vyhodnotenie úrovne PLr musia byť vyhodnotené nasledovné parametre:
- závažnosť poranenia "S"
- S1 - nepatrná závažnosť (bežné nie závažné poranenia),
- S2 - závažné zranenia ( závažné poranenia - nenávratné ).
- frekvencia vystavenia sa nebezpečenstvu "F"
- F1 - zriedkavé vystavenie sa nebezpečenstvu a/alebo ľahko odhaliteľné riziko,
- F2 - vyššia frekventovaná možnosť vystaviť sa nebezpečenstvu a/alebo ťažšie odhaliteľné riziko.
- možnosť vyhnúť sa nebezpečenstvu "P"
- P1 - možné na základe špecifických podmienok,
- P2 - takmer nemožné.
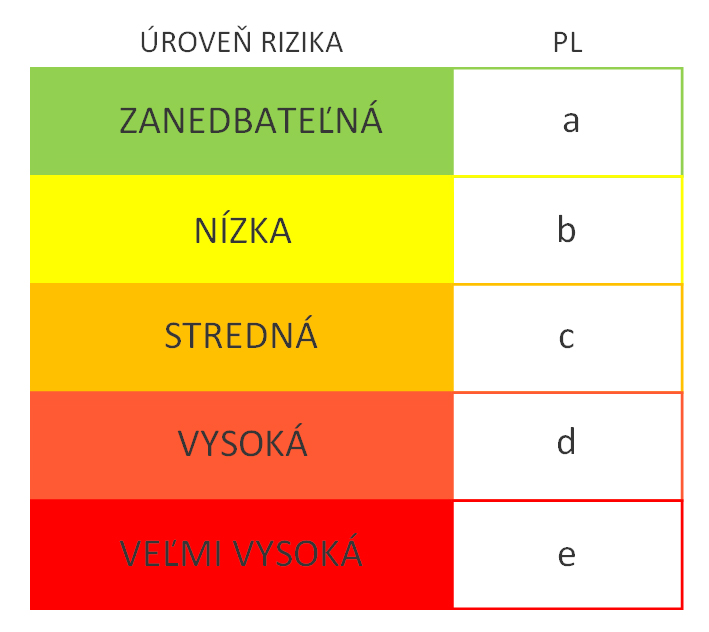
- Posúdenie rizika
Aké potrebné operácie je nutné uskutočniť pre redukciu rizika? Pozrime sa na nasledovný obrázok č. 2. Zoberme si za príklad, že sme nášmu robotickému pracovisku určili v predošlom bode vysokú úroveň nebezpečenstva (PLr = vysoká). V takomto prípade budeme potrebovať na zabezpečenie celého pracoviska bezpečnostné prvky, ktoré budú zaradené v kategórii minimálne d, alebo vyššie (PL≥d). Bezpečnostné skenery, snímače a podobne budú musieť byť zaradené v danej kategórii PL ≥ d, pričom danú kategóriu PL samotných bezpečnostných prvkov stanovuje ich výrobca. Dané informácie nájdeme v technickej dokumentácii od výrobcu ku konkrétnym bezpečnostným prvkom.
- Eliminácia rizík
Dôležitým krokom v danom bode je položiť si otázku: je dané riziko akceptovateľné? Alebo inými slovami: je úroveň rizika PLr postačujúca? Každého snaha je bezpochyby riziko minimalizovať, teda jednotlivými bezpečnostnými krokmi sa prepracovať do kategórie PLr so zanedbateľnou úrovňou rizika. Ak je naším výsledkom predošlého posúdenia rizík práve kategória PL = a, nie je nutné vykonávať ďalšie potrebné operácie k zabezpečeniu osôb na danom pracovisku. Ak sa však nachádzame v kategórii s vysokou úrovňou rizika PL = d, musíme sa zamerať na rizikové operácie a pokúsime sa o elimináciu rizík. Po daných úpravách bezpečnostného konceptu celého pracoviska je potrebné vrátiť sa ku prvému bodu, a to ku identifikácií zdrojov rizík pričom opätovne pokračujeme všetkými bodmi až po elimináciu rizík.
Uveďme si ako príklad, že použijeme pre zabezpečenie robotického pracoviska v kritických miestach, kde môže prísť ku ťažkých zraneniam osôb, bezpečnostné skenery či iné technológie ktoré sa nachádzajú v kategórii PL≥d. Dané systémy však zásadne menia správanie sa celého systému, a tým sa menia jednotlivé parametre pri stanovení úrovne rizika. Z daného dôvodu je potrebné práve opätovné vykonanie všetkých bodov jedna až päť. V niektorých prípadoch je nutné si uvedomiť, že jednotlivými úpravami a opätovnými prehodnoteniami vieme zaistiť nie len vyššiu bezpečnosť, ale v istých prípadoch taktiež ušetriť finančné zdroje.
Príklad: Posúdenie rizík robotických aplikácií: